With the socio-economic development and diversification of traffic and logistics,vehicle have been integrated into people’s daily life.The emergence of automotive electrical system improving the driver’s comfort and safety of driving greatly.Reversing alarm system improve the safety when parking.This article introduce the Reversing Park-Assist system working principle so that we can get in-depth understanding of reversing alarm system.
Reverse Park Assist System Classification:
According to the market positioning,cost,vehicle network architecture and other factors,divided into as below:
1 Equiped with separate controller,no network communication protocol.
2 Equiped with separate controller,using the CAN network communication protocol.
3 No separate controller,using LIN network communication protocol.
4 No separate controller,using LIN and CAN network communication protocol.
Reverse Park Assist System Work Principle:
1 Separate Controller,no network communication protocol.
The Reverse Park Assist System consist of parking sensors,controller,back-up alarm beeper or displayer,and the communication between them by wire harness.The connections between parking sensors and controller is based on wire harness,and the GND of each parking sensors is separate or use in common.If one of parking sensor be damaged,it will not affect the others.
Detail Working Principle:
Controller drive the parking sensors to detect the obstacle and distance when it receiving the signal from reverse switch.The parking sensors detect the distance form vehicle to obstacle,when the distance reach alarm valve,the controller controls back-up alarm beeper work.Generally,the back-up alarm beeper is integrated inside the controller,or installed in the cab separately,connected to controller by wire harness.If vehicle equiped with displayer,it can show the distance valve from vehicle to obstacle.Below diagram show the reverse park assist system.

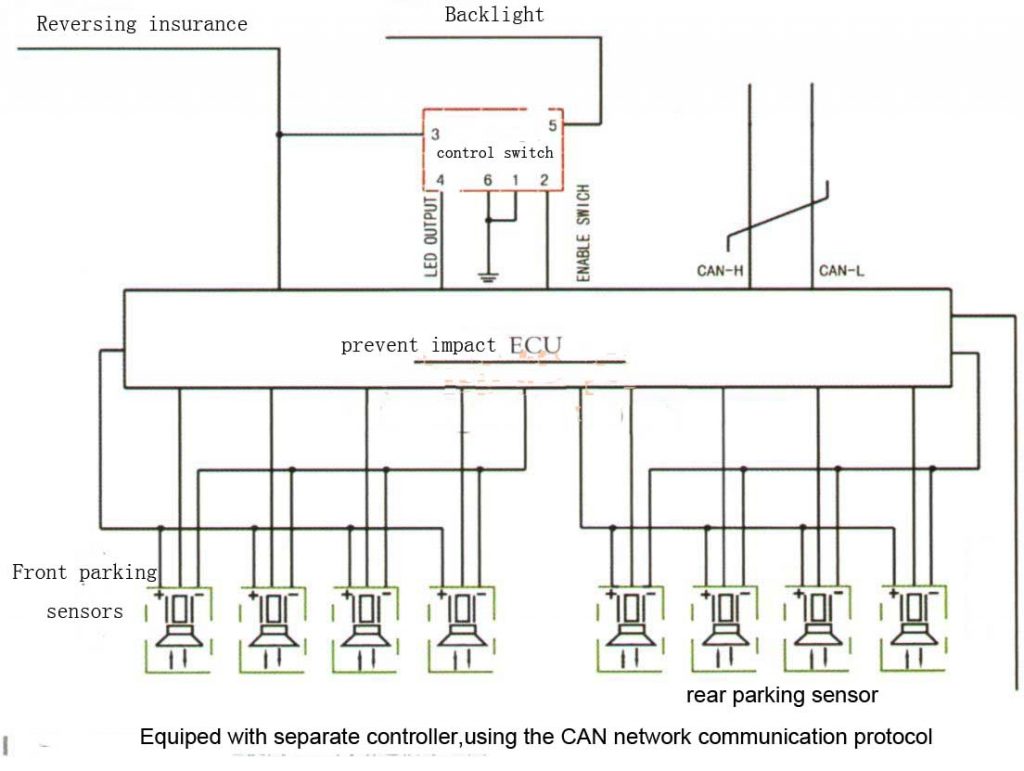
2 Separate Controller,CAN network communication protocol.
The Reverse Park Assist System consist of park sensors,controller,control switch and CAN network architecture.The parking sensors,control switch and controller connected by wire harness,the GND of each parking sensors is use in common.The damaged of one of park sensor maybe affect others.The controller communicates with other modules via the CAN network architecture, there is no separate beeper or reversing obstacle distance information display device.
Detail Working Principle:
Controller drive the parking sensors to detect the obstacle when it receiving the signal from reverse switch.Or control the reverse parking assist system by separate control switch in order to get parking assist information when vehicle driving ahead.The controller send distance from vehicle to obstacle and alarm information by CAN network.The CAN bus follow the standard for the ISO 11898-2,communication rate 500Kbps.Multimedia receive the distance information by CAN network and display it on the screen,the back-up alarm beeper give an alarm.At the same time,the controller monitoring the vehicle state information,such as:handbrake…if the vehicle is in the parking state,hang up the reverse gear or operate the control switch,the reverse park assist system controller will not give an alarm and there is not obstacle distance information on the displayer.The reserve parking assist syste shows as below diagram:
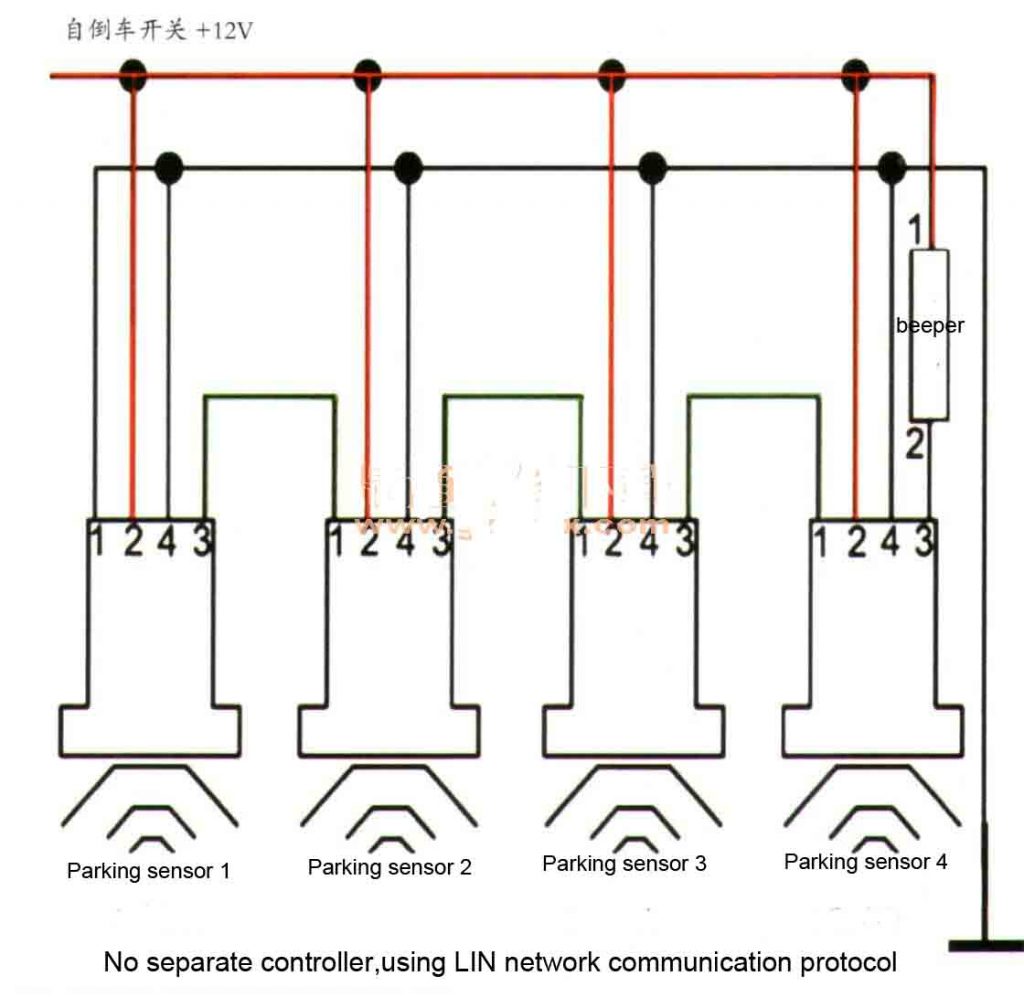
3 No Separate Controller,LIN network communication protocol.
This system consist of parking sensors,beeper and LIN architecture.The communication between parking sensors,and between parking sensor and beeper via LIN network,the transmission rate is 19.5Kbps.The feature of this system is without control ECU,each sensor probe implements a tandem network connection,the system work beats and obstacle data are processed by the respective sensor probes themselves.Each parking sensor probes has same structure and parameters exactly.And you can installed sensor probe at will,it will automatically identify the location after power on.The reverse alarm and other sensors probe will stop working when one of sensor probe fails.
Detail Working Principle:
When hanging the reverse gear,the reversing switch will be turned on,then 4 parking sensors beginning work.Sensors detect the obstacle distance information,the beeper will give an alarm when the distance reach the alarm valve.The system shows as below:
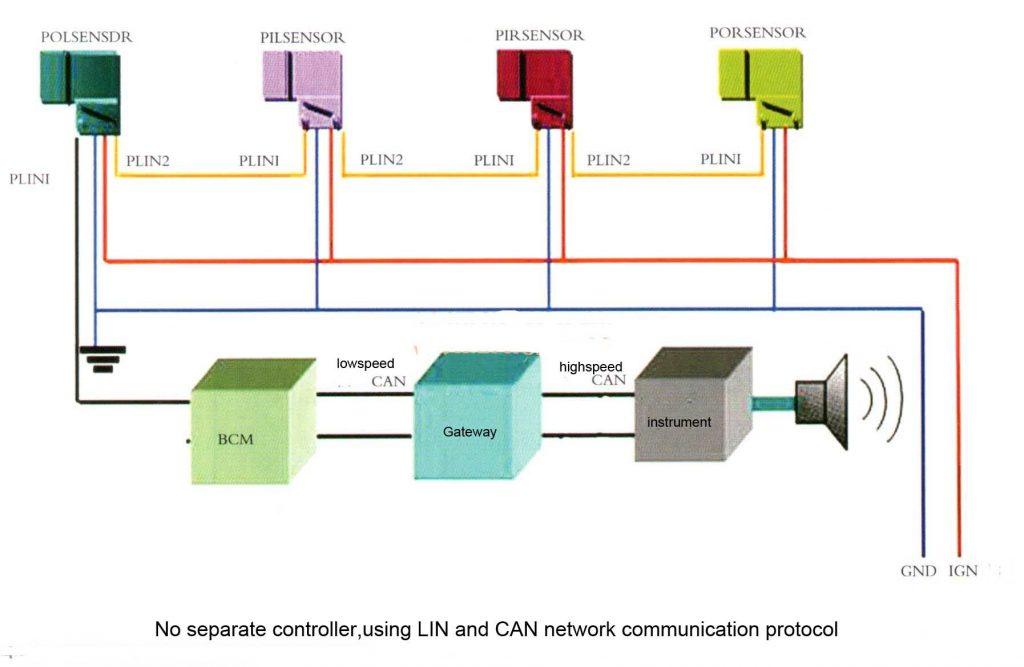
4 No separate controller,using LIN and CAN network communication protocol
This system consist of parking sensors,network dispatcher,combination instrument(which acts as a beeper),a multimedia (display obstacle distance information),LIN line,CAN line network architecture.The parking sensors and network dispatcher connected by LIN line,its transmission rate is 19.5 Kbit/s.Each parking sensor probes has same structure and parameters exactly.And you can installed sensor probe at will,it will automatically identify the location after power on.The network dispatcher is separate controller or is integrated into other modules.Below diagram show the system network dispatcher is integrated into the BCM,and connected to parking sensors by LIN line.In addition,the BCM communicate with whole vehicle CAN network modules by CAN network architecture.
Detail Working Principle:
The network dispatcher which is integrated in BCM receiving the active signal of parking,drive the parking sensor detect the obstacle distance,and sent the obstacle distance information and beeper alarm information via CAN network and gateway.Then combined instrument control internal beeper to give an alarm,and the centre LCD displayer shows the obstacle distance information.The whole system works as below diagram shows: